|

The RSF supermini series are ultra-small AC servo actuators combining ultra-precision control deceleration device Harmonic Drive® that provides precision rotation operation at a high torque with ultra-small AC servo motor developed to make use of the performance of the decelerator.
Actuators with an electromagnetic brake are also included in the lineup. They can meet fail-safe requirements of equipment to prevent accidents upon power supply failure. The dedicated servo driver HA-680 is an AC servo driver for 24VDC power supply. The small and multi-functional HA-680 driver is equipped with position control, speed control, and torque control as standard to control operation of the RSF supermini series correctly and precisely.


|
• Small, lightweight, and high-torque
• Standard lineup of actuators with a brake
• Superior positioning precision
• Stable controllability
Used for:
• Semiconductor manufacturing Systems
• FPD manufacturing systems
• Electromic component Insertion machines
• Measurement analytical and test systems |
 Type : RSFsupermini series Type : RSFsupermini series
 Model No: 3,5 Model No: 3,5
 Version symbol: A Version symbol: A
 Harmonic Drive®Reduction ratio: 30,50,100 Harmonic Drive®Reduction ratio: 30,50,100
 Encoder type E: Incremental encoder Encoder type E: Incremental encoder
 Encoder resolution Encoder resolution
020:200p/rev (Model No: 3)
050:500p/rev (Model No: 5)
 Special specification Special specification
Standard item(with connector)
With brake(with connector)
Special specification (Suffix "SP" is only special specification
Type: HA series
Series: 680
Rated output current:
4: 4A
Correspondence symbol
B: RSFsuperminiSeries
Power supply voltage: DC24V
There are relay cables that connect the RSF supermini series actuator and driver. There is relay cable that connect the driver and PC.

*(** indicates the cable length 3m, 5m, or 10m.)
• Connectors
There are 2 types of connectors for the driver for different set types:
•Connector model: CNK-HA68-S1
For CN1, CN2, actuator line connection, power supply connection .... 4 types(CN1, CN2, TB1, TB2)
•Connector model: CNK-HA68-S2
For CN2, power supply connection .... 2 types(CN2, TB2)
The relay cable for the encoder is necessary for the connection with the driver.
*The relay cable for brake is necessary for the actuator with the brake.
*When the actuator with the brake is used, the relay cable for the brake is necessary.
• Dedicated communication software PSF-520 (free)
This software allows you to set and/or change parameters to the HA-680 driver from your PC.
Dedicated communication software PSF-520 can be downloaded from our website at http://www.hds.co.jp/.
To change the servo parameters of the driver, connect "CN3" of the HA-680 driver and the PC with dedicated communication software PSF-520 installed with the EIA-232C cross cable (dedicated cable HDM-RS232C: Cable length 1.5 m).

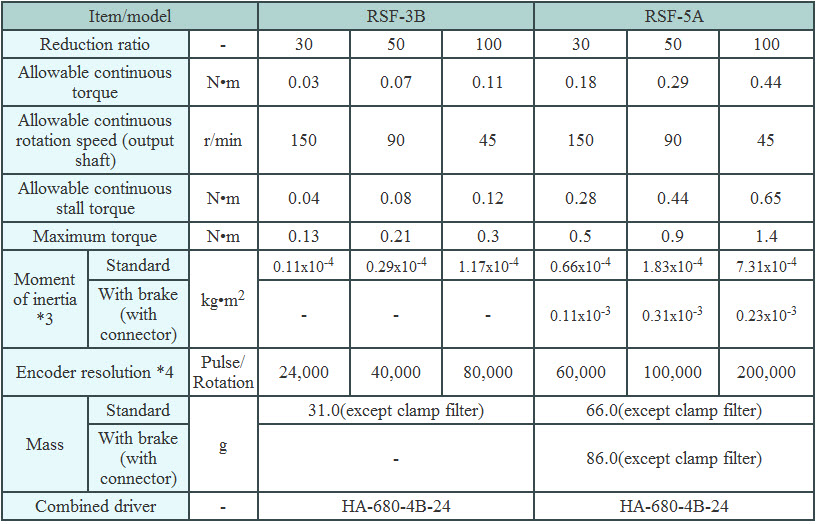
Note 1: The table shows typical output values of actuators.
Note 2: the values in the table above are obtained when it is combined with the combined driver (HA-680-4B-24).
Note 3: The moment of inertia is the total value of the motor shaft and Harmonic Drive moment of inertia values converted to the output side.
Note 4: The encoder resolution is (motor shaft encoder resolution when multiplied by 4) x (gear ratio



|


